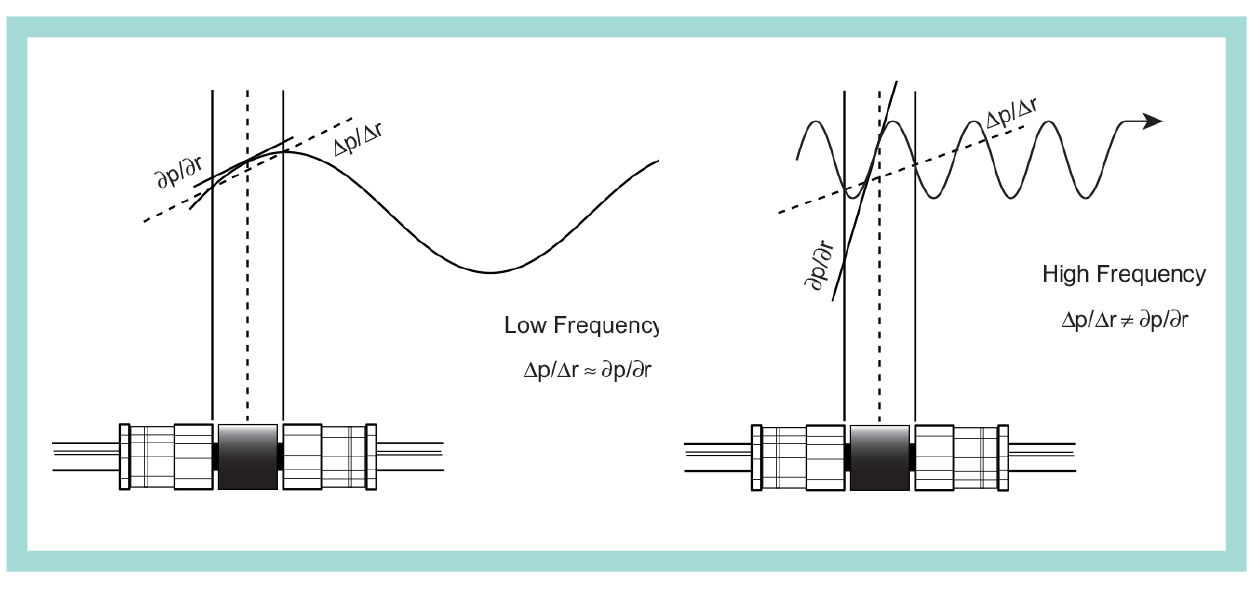
At low frequencies, there will be only a small difference between the signals from the two microphones. The measurements will therefore be more sensitive to self-generated noise and phase mismatch errors in the measurement equipment.
These problems can be reduced by using a longer spacer between the microphones, but this will reduce the high frequency limit.
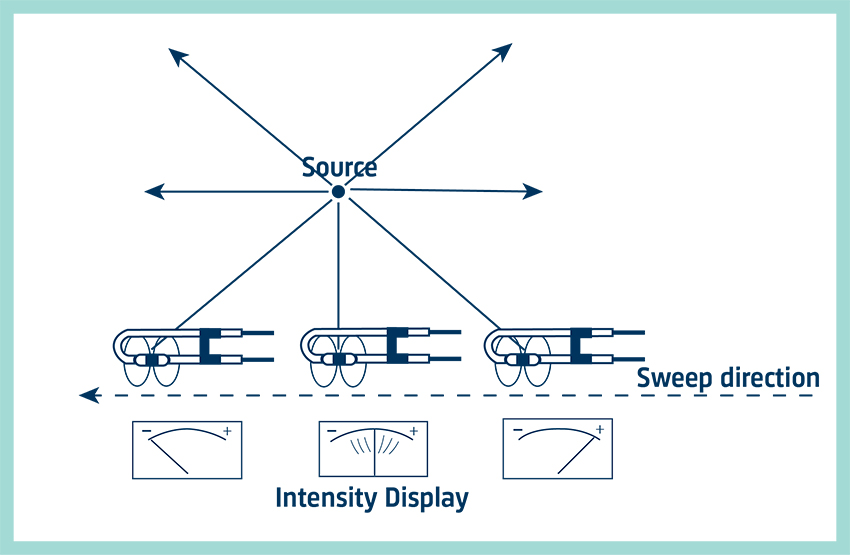
The same sound signal arrives at the two microphones with a small delay that is used to calculate the velocity of the sound propagation. Because there are translations between delay, phase, and pressure-intensity index for sound intensity measurements, errors from the phase perspective can be examined and translated into the pressure-intensity index perspective.
Both the microphones and the electrical components in the measurement channels change the phase of the signals. Any difference in the change in the two channels will yield phase mismatch errors. The amount of phase mismatch between the two channels in the analyzing system determines the low frequency limit. At high frequencies, the change in phase across the spacer distance is big. For example, the phase change is 65° at 5 kHz over a 12 mm spacer. On the other hand, at low frequencies, the change in phase across the spacer distance is small. At 50 Hz, the change of phase over a 12 mm spacer is only 0.65°. For accuracy to within 1 dB, the phase change over the spacer distance should be more than five times the phase mismatch.
The international standard for sound intensity instruments IEC 61043 sets minimum requirements for the instruments, pressure-residual intensity index. These requirements can be translated into phase errors for the whole system giving ±0.086° at 50 Hz and ± 1.7° at 5 kHz.