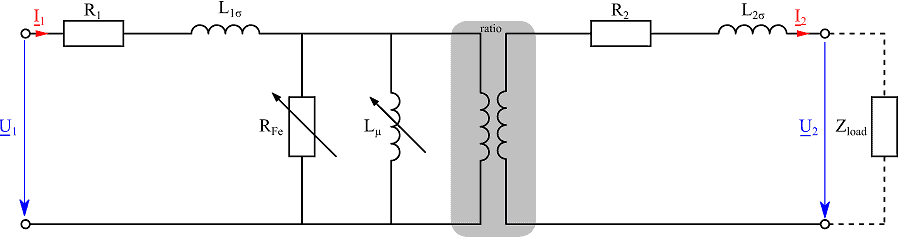
Eddy current losses arise due to a current flow in the ferrite core which is caused by induced voltages. In accordance with Lenz's law, this current opposes the change that caused it. To minimize the current flow, the ferrite core is made up of plates that are isolated from each other. The hysteresis losses are caused by the periodic remagnetization of the ferrite core, since energy is required to align the molecular magnets in the iron (Weiss domains). Since both the main inductance L
µ and the iron loss resistance R
Fe are dependent on the core material with non-linear permeability µ
Fe, both follow a non-linear course. R
K = R
1 + R
2 ü² (1)
L
K = L
1σ + L
2σ ü² (2) The leakage inductances may be considered as linear, since their field lines run primarily through the air, which exhibits constant permeability. For further considerations the equivalent circuit diagram from Figure 2 is simplified still further (Figure 3). The voltage drop on R
1 and L
1σ is negligibly small in comparison to the voltage drop due to the iron loss resistance R
Fe and the main inductance L
µ in normal operation. This makes it possible to contact the iron loss resistance R
Fe and main inductance L
µ directly with the input terminals. [1] In equations (1) and (2) the ohmic resistance R
2 and the leakage inductance L
2σ of the secondary side are converted to the primary side and combined to form R
K and L
K. The measurements and calculations performed below refer to the equivalent circuit diagram simplified in this manner. Quantities I'
2, U'
2 and Z'
load have been converted from the secondary side to the primary side taking into consideration the transmission ratio.


